Координирането на действията на робот е трудна задача, особено когато около него има мнооого други роботи, а ние имаме нужда от относително точна локализация. На помощ има ново решение с усъвършенстван анализ на информацията за околната среда, относителната локализация на роботите в нея, разстоянието между тях и действията им.
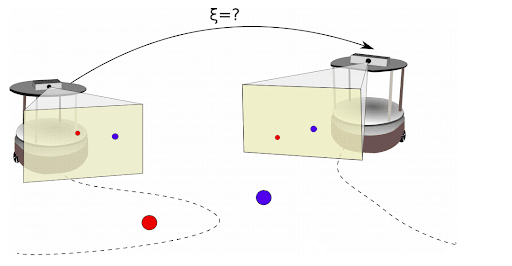
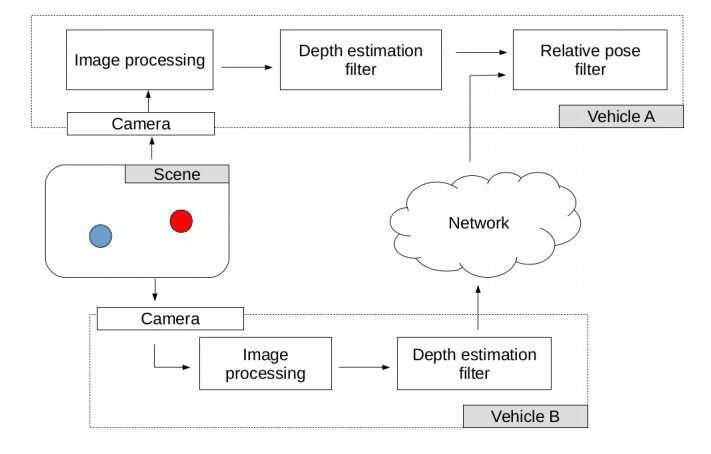
Проучването се основава на нови резултати от изследвания и представлява фреймуърк, който оценява средата в 3D и относителността на позицията между две земни превозни средства от подобен вид, както и динамиката, регистрирана от камерите им. Тази информация се взима поотделно от роботите и се комбинира за възможно най-точно изчисление. След обработка на данните от Kalman Filter (EKF) се получава и нужният резултат за местоположението им.
Идеята увеличава възможностите групи от роботи да бъдат използвани за извършване на задачи. Набавянето на информация за местоположение помага за по-лесно и правилно планиране на траектории и избягване на сблъсъци.